|
I am a Research Scientist at DeepMind in Paris, where I work on generative models. I obtained my PhD from INRIA and DI ENS, where I was part of the Willow team, and developed learning methods to perform visually-guided tasks on a robot with my advisors Ivan Laptev and Cordelia Schmid. Before my PhD, I earned a master's degree in mathematics, machine learning and computer vision (MVA) from ENS Paris-Saclay and in probability from ENS Lyon. I also had the opportunity to work as visiting student researcher in the UC Berkeley Department of Statistics for a year under the supervision of Steven N. Evans and as an intern in the Oxford Department of Statistics with Julien Berestycki. Email / CV / Google Scholar / Github |

|
|
|
|
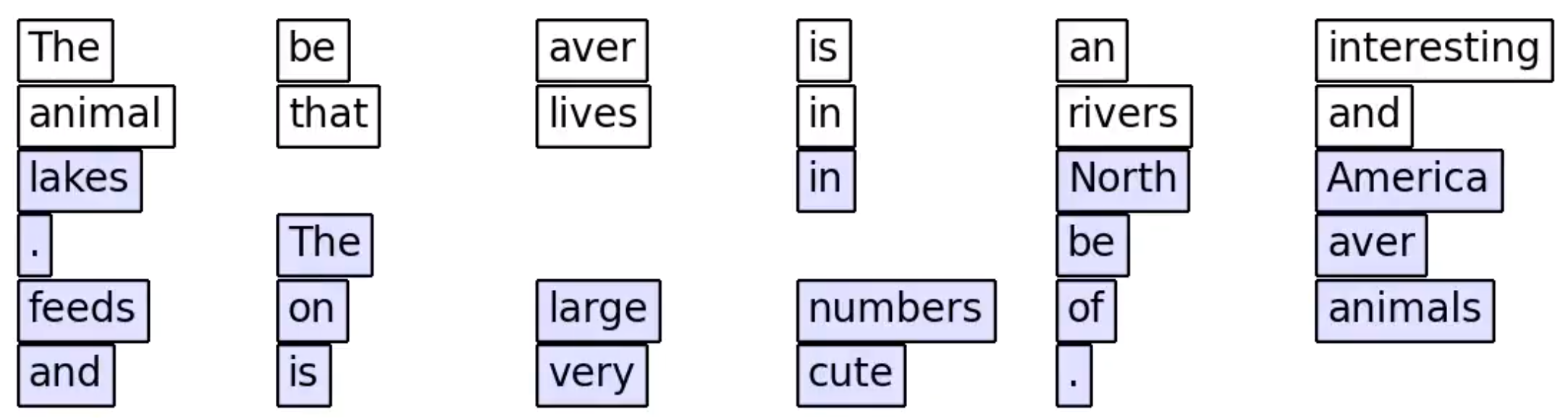
Robin Strudel, Corentin Tallec, Florent Altché, Yilun Du, Yaroslav Ganin, Arthur Mensch, Will Grathwohl, Nikolay Savinov, Sander Dieleman, Laurent Sifre, Rémi Leblond Preprint, 2022 arXiv / bibtex A general-purpose and flexible language diffusion model. |

|
Thomas Chabal, Robin Strudel, Etienne Arlaud, Jean Ponce, Cordelia Schmid IROS, 2022 arXiv / bibtex Assembling structures from a single photograph. |
|
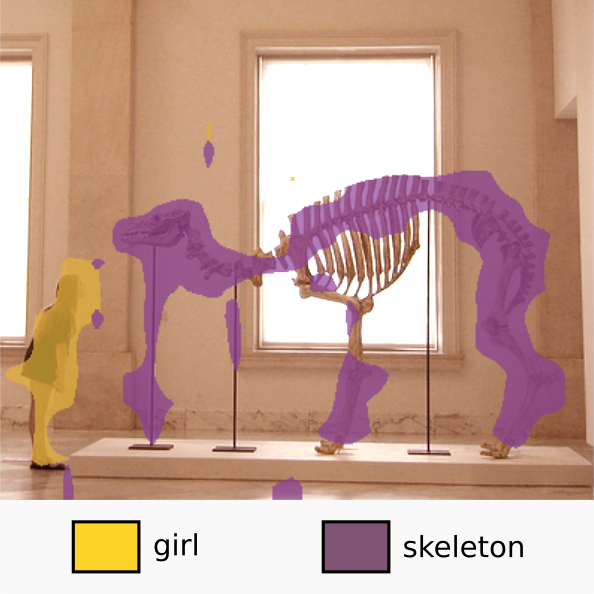
Robin Strudel, Ivan Laptev, Cordelia Schmid Preprint, 2022 arXiv / bibtex Learning segmentation from referring expressions, without pixel-level supervision. |
|
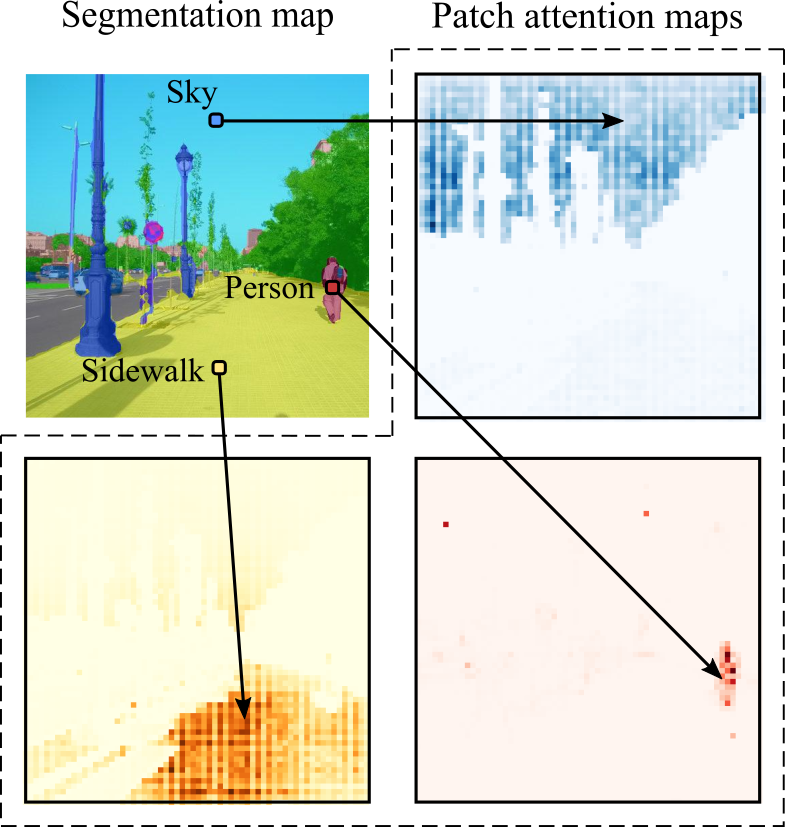
Robin Strudel*, Ricardo Garcia*, Ivan Laptev, Cordelia Schmid ICCV, 2021 arXiv / code / bibtex Semantic segmentation as a sequence-to-sequence mapping with Vision Transformers. |
|
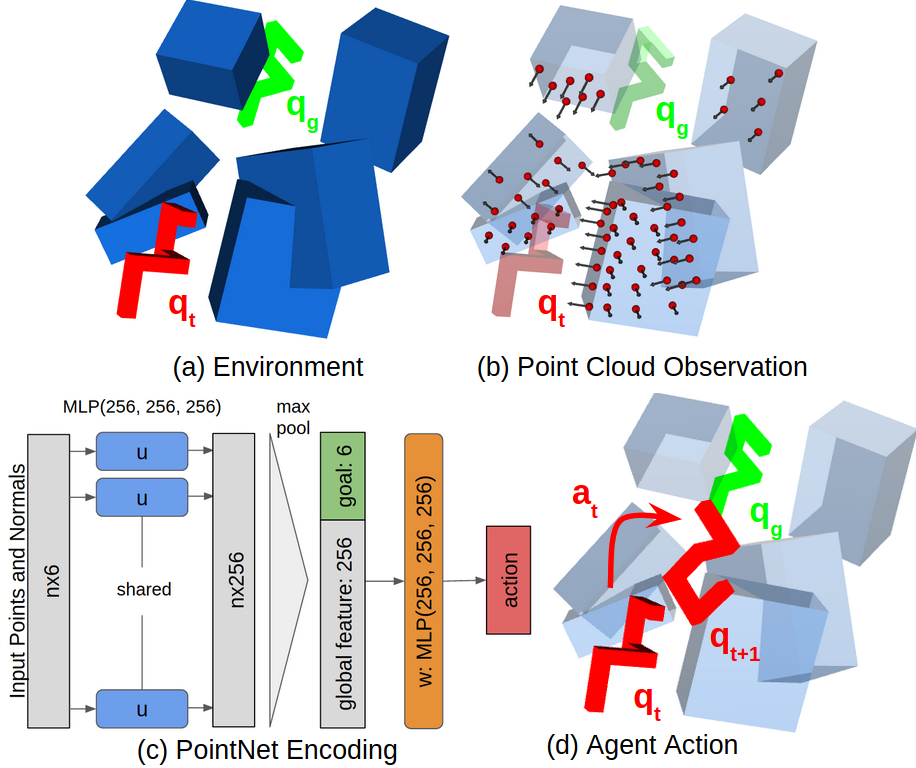
Robin Strudel, Ricardo Garcia, Justin Carpentier, Jean-Paul Laumond, Ivan Laptev, Cordelia Schmid CoRL, 2020 arXiv / project / code / bibtex Visually guided motion planning in unstructured and dynamically changing environments. |

|
Robin Strudel*, Alexander Pashevich*, Igor Kalevatykh, Ivan Laptev, Josef Sivic, Cordelia Schmid ICRA, 2020 arXiv / project / code / bibtex Learning to perform manipulation tasks with a hierarchical approach. A vocabulary of simple skills is learned from demonstrations then combined with a planning policy to perform more complex tasks. |
|
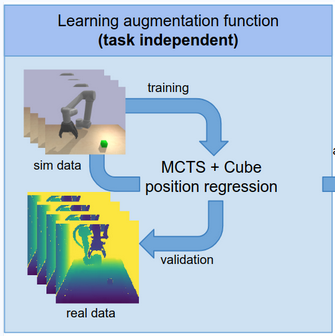
Alexander Pashevich*, Robin Strudel*, Igor Kalevatykh, Ivan Laptev, Cordelia Schmid IROS, 2019 arXiv / project / code / bibtex Learning sim-to-real data augmentation automatically with MCTS and then transferring policies learned in simulation to a real robot. |
|
Design and source code from Jon Barron's website. |